2015-03-25
In this post, we build off the theory developed in Part 1 and actually implement a double-pendulum simulator in a few different programming languages. We'll start by writing our own Runge-Kutta solvers which will give us the position, velocity, and acceleration data that is needed to completely describe the trajectory of a double pendulum system given an arbitrary set of initial conditions. Once we have this data, we can move onto plotting it using a few different plotting libraries. The languages I'll be going over are Matlab, C++, and Python. I chose these languages because they are all quite popular and any given programmer is likely to understand at least one of them.
Getting the Code
All of the code is hosted here on Github, and more details can be found at the Double-Pendulum-Simulation project page on my website. The entire project is available for download via either of these two links : .Tar , .Zip. You can also clone it straight from the command line :
git clone https://github.com/jhallard/Double-Pendulum-Simulation.git
cd Double-Pendulum-Simulation
Quick Review
Below is a quick summary of the last post, for more information, read Part 1.
2015-03-04
I've always thought that the double-pendulum makes an interesting system to simulate because the problem of doing so sits at the intersection of physics, mathematics, and computer science. The double-pendulum is also an approachable example of a chaotic system, which means it exhibits very complex and interesting behavior. Since I find it so interesting, I'll spend the next few posts writing about the topic. I'll start in this post with a derivation of the equations of motion and a look at the methods used to solve these equations. In the next post we'll actually solve these equations and implement the simulation in a few different programming languages, drawing performance and other comparisons along the way. Post 3 will wrap up this series with a deeper look into the complexities of the system, including an examination of its chaotic properties
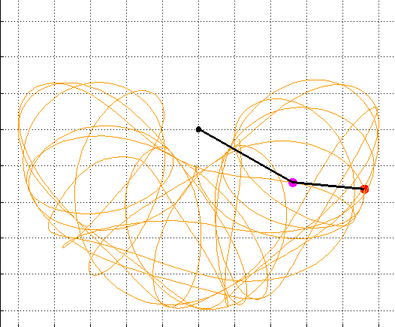 The Double Pendulum - A snapshot at 5 seconds into my double-pendulum simulation in matlab
The Double Pendulum - A snapshot at 5 seconds into my double-pendulum simulation in matlab